


蛇形机器人
蛇形机器人是一种独特而灵活的机器人设计,它模仿了自然界中蛇类的运动方式,从而能够在复杂多变的环境中执行各种任务。这种机器人通常由多个可弯曲的关节组成,每个关节都能独立地控制其弯曲程度和角度,从而实现了类似于蛇类的蜿蜒爬行和盘旋缠绕的动作。
研究详情
蛇形机器人的设计充分考虑到了其运动学特性和动力学特性,以确保其在不同地形和障碍物下都能稳定而高效地移动。通过精密的控制系统和先进的传感器技术,蛇形机器人能够实时感知周围环境的变化,并据此调整自身的运动策略,以应对各种复杂的挑战。
蛇形机器人的应用领域十分广泛。在救援和搜索任务中,蛇形机器人能够深入狭窄或危险的区域,寻找被困者并传递关键信息。在医疗领域,蛇形机器人可以用于进行微创手术,通过其灵活的运动能力来减少手术创伤和恢复时间。此外,蛇形机器人还在军事侦察、管道检测、环境监测等领域展现出巨大的潜力。
总之,蛇形机器人以其独特的设计理念和强大的适应能力,成为了现代机器人技术领域中不可或缺的一部分。随着技术的不断进步和应用的不断拓展,蛇形机器人将在未来发挥更加重要的作用。
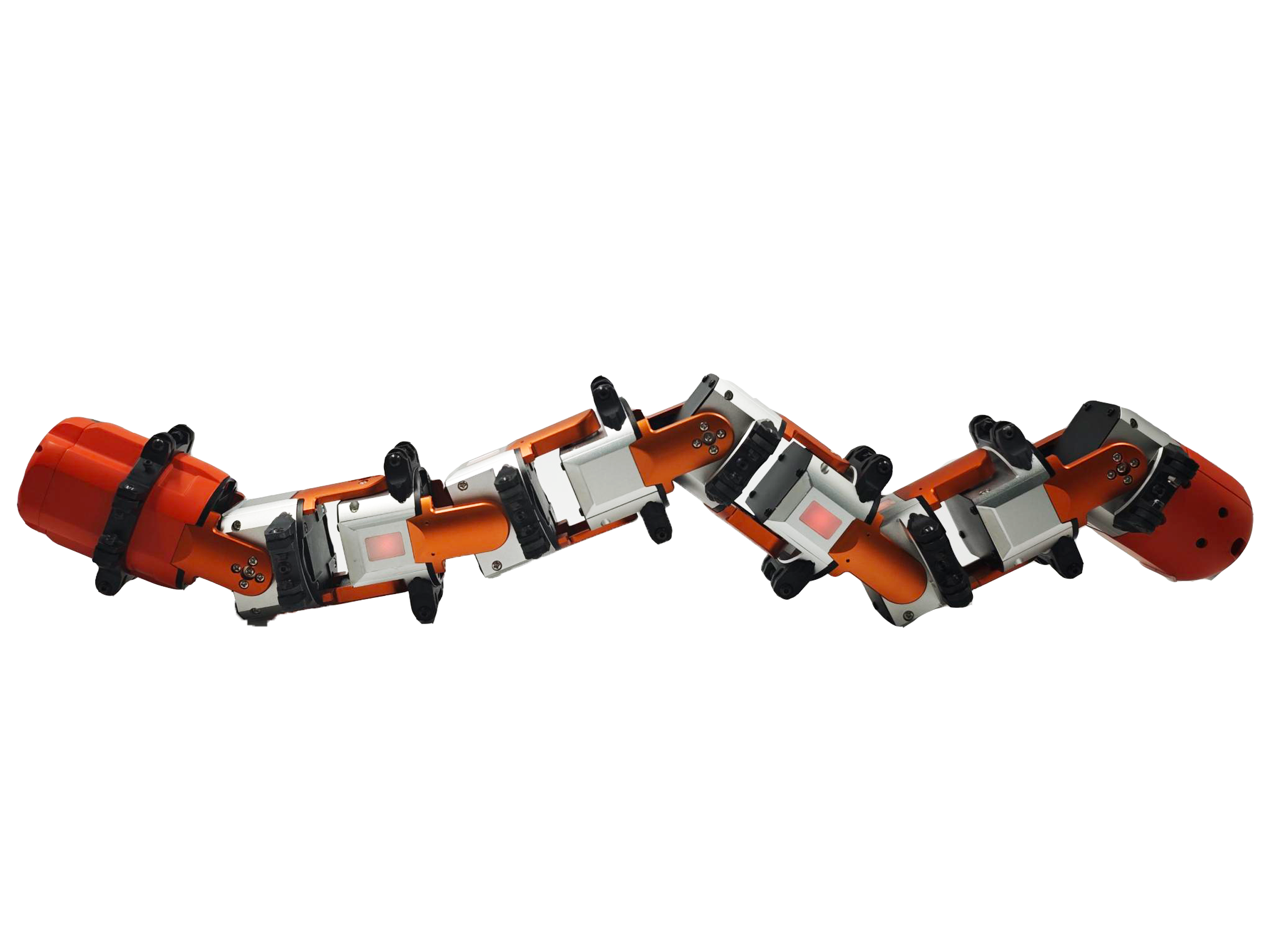
本团队已承担国家自然科学基金面上项目、交通部重大专项、工信部重大专项、广东省重大专项、江苏省交通厅重大专项等多项项目,且自主研发基于正交关节连接的蛇形机器人SSCUT-I、SSCUT-II、SSCUT-III 三代实体机,团队在蛇形机器人动力学建模、管道攀爬和运动控制等方面积累了丰富的研究经验。
第一代蛇形机器人SSCUT-I
第二代蛇形机器人SSCUT-II
最新一代蛇形机器人SSCUT-III